Turtlebot Path Planning
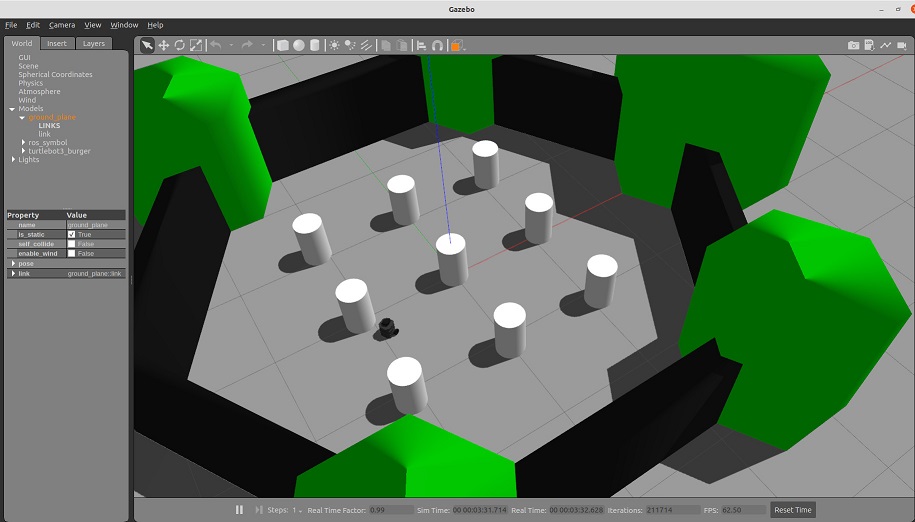
This project was for the robotics class in 2021. The goal of this project was to implement path planning algorithms for the Turtlebot3 Burger robot.
I implemented the bug1 and bug2 algorithms to tackle this problem. You can find the details of bug1 and bug2 algorithms here.
- Tech Stack: Python, ROS, C++, CMake, Gazebo
- Github URL: Project Link